Timeline: June 2023 – October 2025
Status: Roadmap · Proposal approved
Primary User: Operations Manager, Yard driver
Team: 1 designer, engineering, data science, product management
Domain: Logistics / container terminal operations
Conceived and designed a real-time spatial interface for container yard operations, driven by field observation before any official brief was defined.
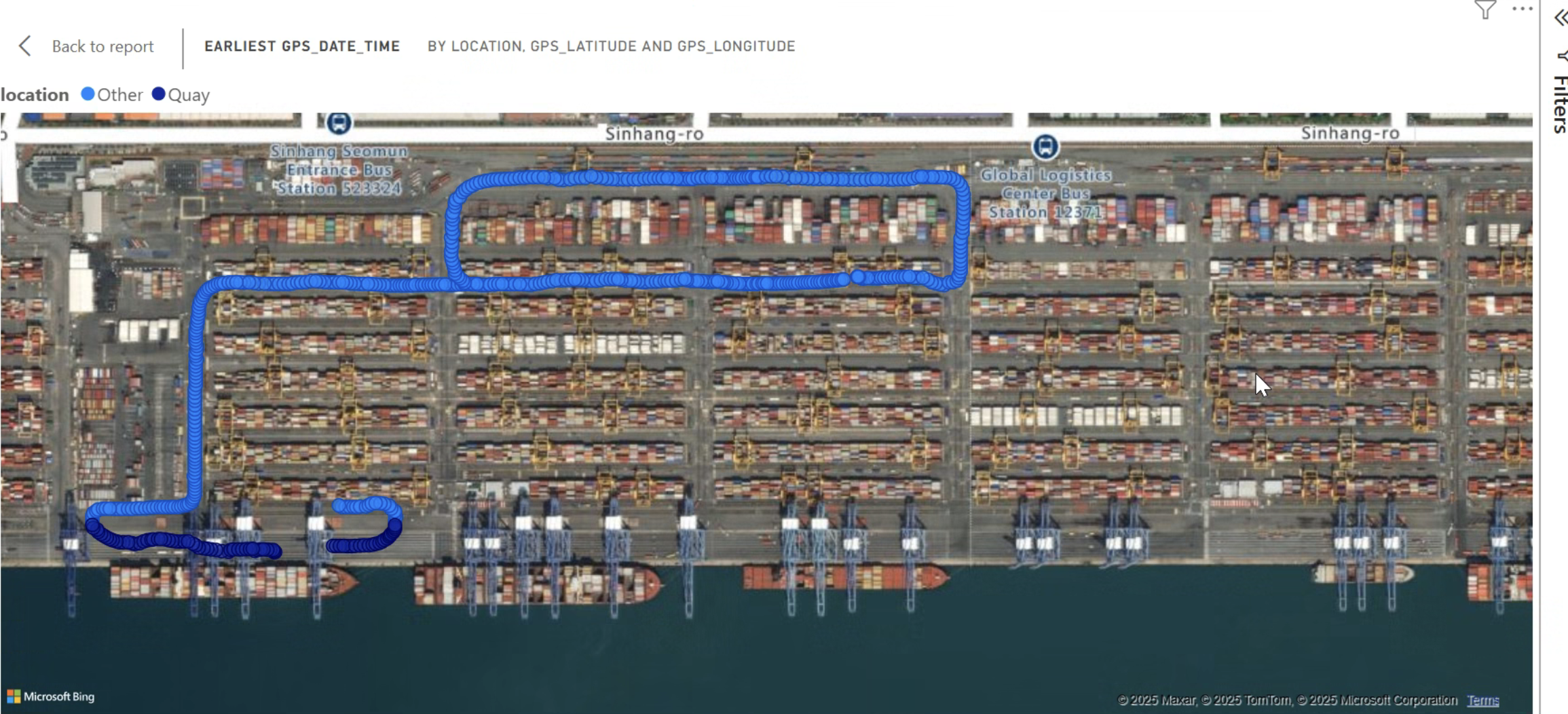
The AICON VMT (Visual Movement Tracker) gave terminal operations managers and yard drivers a live, spatially-accurate view of their yard, replacing fragmented TOS screens and radio calls with a single source of operational truth.
Context & Scope
A container yard is one of the most operationally complex environments in physical logistics. At a major terminal, thousands of containers move continuously. Every crane allocation, every equipment dispatch, every transfer sequence affects what happens next. Decisions are made under time pressure with consequences that ripple forward for hours.
The problem was that the tools available didn't reflect this environment. Legacy Terminal Operating System interfaces reduced yard management to lists and status codes, stripping the spatial and temporal context from decisions that are fundamentally about location, movement, and sequence. Operations teams compensated with radio calls, physical yard scanning, and institutional knowledge built over decades. The system wasn't helping. Experienced people were carrying its shortcomings.
AICON VMT was my response to that gap. Not a brief I was handed. But a concept I developed from direct field observation, validated through structured research, and presented to engineering, product, and C-suite stakeholders as a formal product proposal. It was approved for the roadmap.
My Role & Leadership
- Originated the VMT concept from field research (no prior brief existed)
- Identified the spatial situational awareness gap during on-site observation and developed it into a formal product proposal: business rationale, user validation, and design concept
- Led stakeholder alignment across product, engineering, sales, and C-suite. Navigating competing priorities between operational users and commercial requirements
- Developed the high-fidelity spatial prototype demonstrating the three-layer interaction model
- Collaborated directly with data engineering to define the real-time spatial data model, translating TOS container position data into a visual coordinate system
- Presented to senior leadership including C-suite; secured roadmap prioritisation
- Managed the gap between approved design intent and engineering capacity: scoped a phased delivery model that delivered the core spatial layer first, with AI overlays and temporal simulation in subsequent releases
Problem Statement
Operations managers and yard planners were making spatial decisions with non-spatial tools. The gap between what they needed to know, where everything is (what's moving, what's at risk, what's about to go wrong) and what their systems showed them (tables, status codes, list views) was enormous. And it was being filled entirely by human effort: physical presence in the yard, radio communication, and pattern recognition built up over years of experience.
The cost of this gap wasn't always visible on a balance sheet. But it was real.
Key pain points uncovered in research:
No unified spatial view. Managers assembled situational awareness from three or four separate screens and direct observation. There was no single source of operational truth.
Equipment allocation without equipment visibility. Decisions about deploying equipment were made without reliable visibility of where that equipment was versus where it was assigned.
Rehandles were invisible. Unnecessary container moves (the most expensive inefficiency in yard operations) couldn't be detected or predicted until the damage was done.
Institutional knowledge wasn't captured. New team members needed months to develop the situational awareness that experts carried in their heads. The system had no mechanism for encoding or transferring it.
"I know this yard better than the software does. The software should know it as well as I do."
The Strategic Frame
Spatial interfaces create strategic value beyond operational efficiency, they make AI-driven transformation tangible. Terminal operators invest in AI platforms not only for productivity gains, but for visible innovation they can showcase to executives, stakeholders, and prospective customers. The VMT prototype became a commercial differentiator before it even launched.
I recognised this early. The C-suite narrative focused as much on market differentiation and enterprise positioning, “no competitor in our tier has this”, as on workflow optimisation. That reframed the discussion from product prioritisation into strategic investment.
Designing AI-native products requires this mindset. The ROI of a feature is not always measured in efficiency alone; sometimes the greatest value comes from making the product’s intelligence, innovation, and competitive advantage immediately legible to the buyer.
Research & Insights
The AIOCN VMT concept was grounded in direct field observation, watching how operations managers and teams actually moved through their workday, what information they sought, and the workarounds they'd developed to compensate for system limitations. I supplemented this with structured interviews and a competitive review of spatial interfaces in adjacent industries (logistics, air traffic management, industrial operations).
Critical design insights:
Spatial awareness is the primary cognitive task. Before making any decision, operations needed to know where things were. All other information was secondary to location, making a spatially-accurate base layer the non-negotiable foundation of the interface.
Density is the enemy of usability. A yard view that tried to show everything simultaneously would be unreadable. The design needed progressive disclosure: start with exceptions and anomalies, let users drill into detail by choice.
Movement patterns matter more than positions. Static container positions were less useful than vectors (where is this container going, how soon, and what's in its way?). The interaction model needed to support temporal as well as spatial reading.
Competitive review of ZPMC SmartPort and RBS TOPX confirmed that technically capable spatial tools existed, but none of them were designed for fast decision-making. The interaction model of air traffic control zoning and priority-first rendering offered a more appropriate reference than existing port software.

The Solution & Key Design Decisions
Three-layer spatial hierarchy. The interface opened at zone level, a colour-coded overview of the entire yard showing congestion, AI-flagged anomalies, and equipment distribution. One click entered block level; a second entered individual container stacks. Each layer surfaced only the information relevant to decisions at that scale.
AI movement recommendations as spatial overlays. Rather than a separate recommendation panel, AICON's yard optimisation suggestions were rendered directly on the yard map as directional arrows with colour-coded priority, showing not just what to move, but from where to where.
Exception-first rendering. The default view was not a neutral representation of the yard, it was an attention-guided one. At-risk containers, congested zones, and equipment deviations were visually amplified. Normal operations receded into the background.
Equipment tracking as an overlay. VMT (Visual Movement Tracker) added a live layer showing the real-time position and status of all active Container Handling Equipment, enabling managers to see the delta between assigned and actual equipment positions at a glance.
Temporal simulation. A time-scrub control allowed managers to run the yard forward based on current AI predictions, seeing what the yard would look like (in 2, 4, or 8 hours) enabling proactive intervention before congestion formed.

Impact & Results
The AICON VMT proposal was approved for roadmap inclusion following stakeholder presentation, with the design concept validated by enterprise customer representatives as addressing a clearly unmet need. As the project remains in development, outcomes are based on validated research, prototype testing, and industry benchmarking:
Roadmap
Concept approved and prioritised, originated entirely from user research and design initiative
Sales asset
Spatial prototype used in enterprise sales presentations before launch, generating early commercial value
↓ Rehandles
Projected reduction in unproductive container moves through spatial AI recommendations
~60%
Reduction in radio calls for equipment location in comparable spatial tool deployments (industry data)
Faster onboarding
Spatial view designed to encode institutional yard knowledge — reducing dependency on experienced staff for situational awareness
Lessons as a design leader
The best product ideas come from watching people work, not asking what features they want. No stakeholder brief would have produced AICON VMT. It came from the gap between what the system knew and what the manager knew. Field time is never wasted.
Proposing product direction is a design leadership responsibility. Junior designers solve briefs. Lead designers question whether the brief is right. Originating a roadmap feature from research and securing its approval, was the most valuable act of design leadership on this project.
Spatial UX is a design discipline in its own right. Designing for density, progressive disclosure, and exception-first rendering required a different mental model than screen-based UI. Cross-industry reference (air traffic, industrial control, logistics) was essential in developing the right interaction language.
Engineering alignment on a spatial feature requires design to do the technical translation first. I had to understand how the data model worked before I could propose how to render it. That investment paid off in a significantly cleaner handoff and faster implementation.
The gap between approved and shipped is where design leadership is most tested. Getting the concept approved was the visible success. The harder work was scoping a phased delivery that preserved the core spatial value proposition while accommodating engineering constraints. The feature that shipped first was smaller than the prototype; it was also the right feature to ship first. Making that argument and holding the quality bar through compromise, is the work that rarely appears in portfolios.